Toyota onthult Walk Me, een vierpotige AI-mobiliteitsstoel die loopt, traploopt en zichzelf opvouwt

Toyota staat bekend om zijn auto's. Het bedrijf is echter niet vies van andere vormen van mobiliteit. Onlangs onthulde het bedrijf op de Japan Mobility Show 2025 een autonome stoel, de Walk Me.
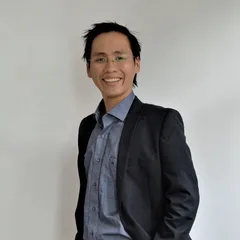
Walk Me is een rolstoel zonder wielen die ontworpen is om mensen met mobiliteitsproblemen te helpen zich te verplaatsen, inclusief het trotseren van trappen en het navigeren over oneffen paden.
De stoel ziet er misschien schattig uit met vier benen die bedekt zijn met pastelkleurige pootjes, maar laat u niet misleiden door de schattigheid. Elk van de ledematen is voorzien van sensoren en actuatoren waarmee hij kan buigen en strekken om in realtime op zijn omgeving te reageren.
Biomimetische beweging rechtstreeks uit de natuur gekopieerd
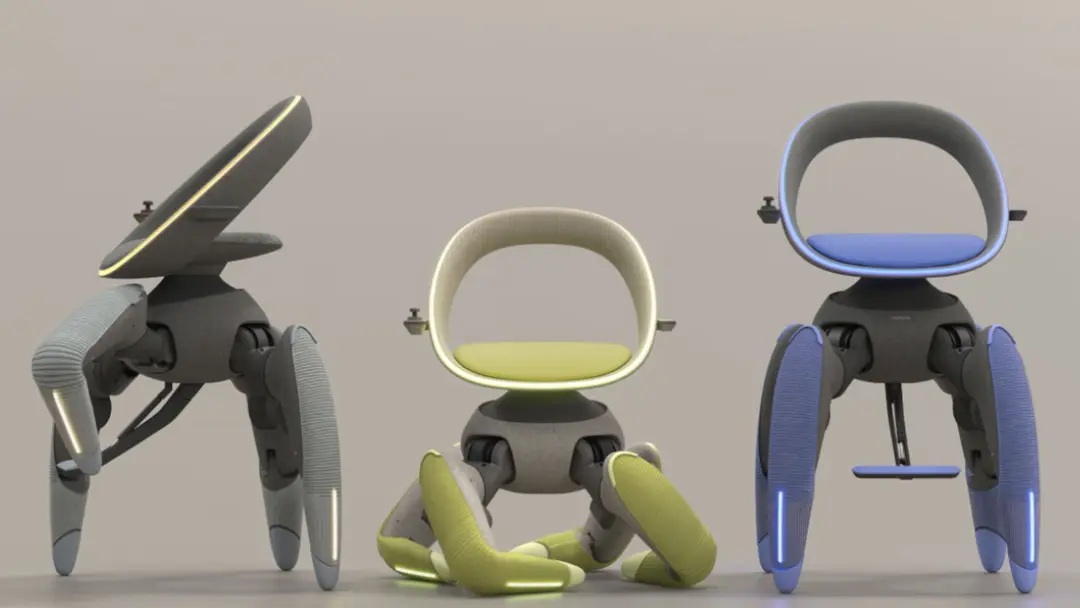
Teche Blog en Designboom melden dat Toyota's inspiratie voor Walk Me afkomstig was van dieren die bekend staan om hun vermogen om over ruw terrein te rijden, zoals geiten en, toepasselijker, krabben. Het voorste paar poten berekent hoogtes om te bepalen hoe de stoel en de inzittende naar voren getrokken moeten worden. De achterpoten dragen bij aan de ondersteuning en genereren stuwkracht.
Toyota's Walk Me pikt obstakels op door de omgeving te scannen met LiDAR en radar. En als u zich afvraagt hoe de inzittende in balans blijft en voorkomt dat hij eraf valt en voer wordt voor YouTube-failingvideo's, dan heeft de robotstoel gewichtssensoren en een automatisch stabilisatiesysteem wanneer hij op hellingen of een hobbelige ondergrond werkt.


Comfort en intelligente bediening
Toyota heeft hier aandacht besteed aan ergonomie, door een stoel te ontwerpen die zich naar het lichaam van elke gebruiker vormt en verstelbare armleuningen heeft. De mobiele stoel reageert ook op stemcommando's, zodat u hem kunt bedienen door "ga sneller" te zeggen of aan te geven waar u wilt dat hij heen gaat. Er zijn handgrepen voor handmatige heroriëntatie.
Walk Me heeft een klein display waarop gebruikers gegevens zoals batterijpercentage en gelopen afstand kunnen controleren. Het hele apparaat wordt gevoed door een kleine batterij onder de stoel, die volgens Toyota een hele dag kan meegaan. De batterij kan gemakkelijk worden opgeladen, net zoals u uw smartphone in het stopcontact steekt.
Voor de veiligheid pauzeert de stoel en waarschuwt hij de inzittende wanneer een gewricht te heet wordt.
Compact ontwerp en draagbaarheid
Walk Me krimpt zichzelf in en gaat uit de weg wanneer u hem niet gebruikt. De poten schuiven telescopisch in, zodat u de stoel gemakkelijk kunt optillen om hem in uw auto of thuis op te bergen.
De wandelstoel is nog steeds een concept en Toyota heeft nog geen plannen om er een product van te maken dat u kunt kopen. Het is echter leuk om te zien hoe het bedrijf laat zien hoe AI en robotica praktische problemen voor de mensheid kunnen oplossen.