ETH Zürich onderzoekers onthullen vierpotige ANYmal AI-robot die hindernisbanen kan afleggen zoals K-9's in bootcamp

ETH Zürijke robotica-onderzoekers hebben een vierpotige ANYmal robot onthuld die in staat is om complexe terreinen te navigeren door gebruik te maken van hooggetrainde AI-modules voor beweging, zicht en locatie. Deze geavanceerde modules breiden de reeks obstakels en terreinen uit waarop viervoetige robots zelfstandig kunnen navigeren.
Eerder werd al aangetoond dat robotische "honden" over schone voetpaden en gangen in gebouwen, maar ook over heuvels en buitenterreinen kunnen navigeren, maar zij waren daarbij afhankelijk van mensen om de training te begeleiden, lange rekentijden om de beste manier van bewegen te bepalen, of voorkennis van de omgeving. Het ETH Zürijk onderzoek omzeilt deze beperkingen en de ANYmal is in staat om dynamisch te herstellen van valpartijen en te navigeren op complexe oppervlakken, ondanks het feit dat hij volledig getraind is binnen een Nvidia Isaac Gym simulatie zonder supervisie.
Drie modules waaruit het AI-brein bestaat
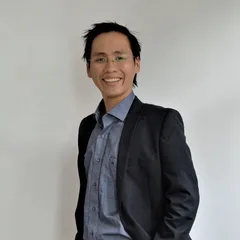
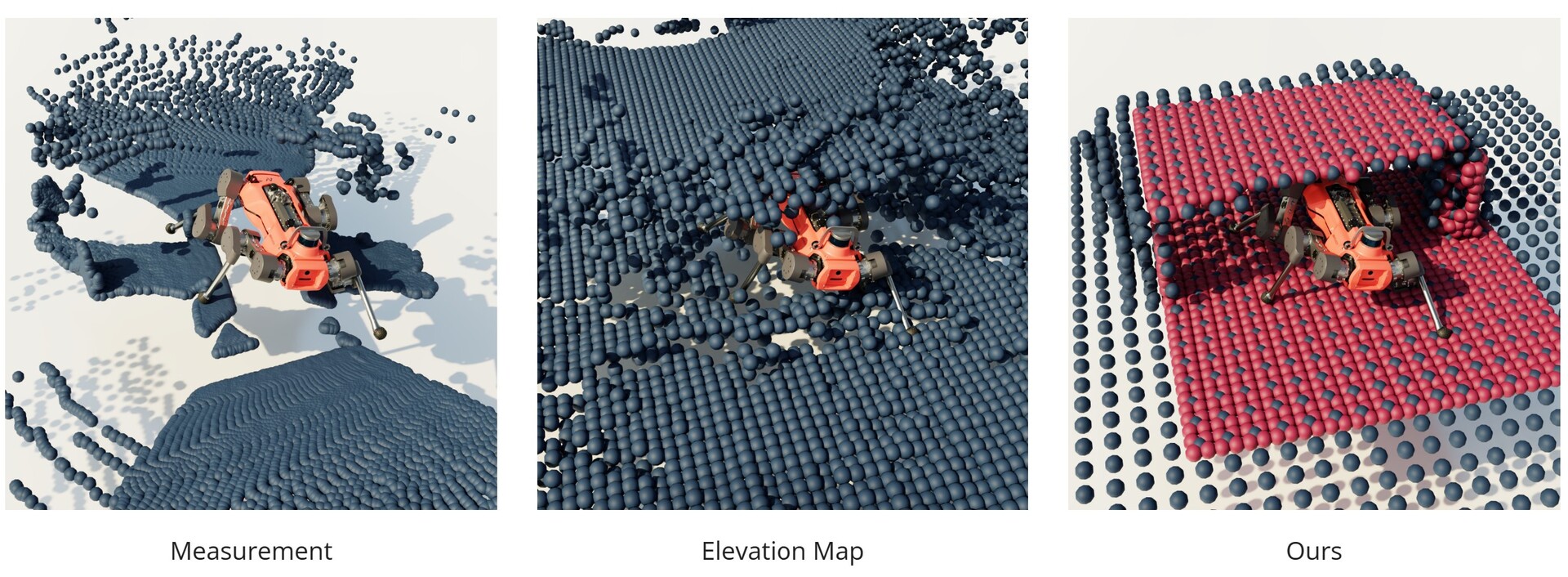
De visiemodule ziet de wereld met behulp van zes Intel Realsense dieptecamera's en een Velodyne LiDAR aangedreven door een Nvidia Jetson Orin controller. Omdat laser- en infraroodscans alleen de positie van individuele punten teruggeven, ondervinden robots door ontbrekende informatie hindernissen bij het navigeren onder obstakels of naar hogere locaties. De ETH-onderzoekers omzeilen dit door de wereld in 3D te reconstrueren op basis van de scans.
De bewegingsmodule bevat vijf acties: omlaag klimmen, omhoog klimmen, hurken, springen en lopen. Elke actie werd onder steeds moeilijkere omstandigheden getraind. De virtuele robot werd bijvoorbeeld getraind om onder steeds lagere tafels te hurken terwijl hij vooruit ging, of om van het ene naar het andere platform te springen terwijl de tussenruimte steeds groter werd.
De navigatiemodule neemt wat de visiemodule ziet en leert dit te combineren met de richting, positie en timing die elke bewegingsvaardigheid vereist om zware, gesimuleerde parcours af te leggen. De module werd getraind op 3000 testparcoursen en leerde meer dan 96% succesvol te navigeren.
ANYmal in actie
Nadat alle drie de modules in simulatie getraind waren, werd het AI-softwarebrein geïnstalleerd in een 55 kg wegende ANYmal D robot, aangedreven door twee sets Intel i7 CPU, 8GB RAM en 240 GB SSD. Videobeelden van de ANYmal die cursussen in het echt voltooit, laten zien dat hij snel uitdagend terrein en obstakels kan overwinnen die andere robots zouden tegenhouden.
Lezers die geïnteresseerd zijn in het ontwikkelen van vaardigheden op het gebied van robotica zouden een kit moeten aanschaffen(zoals deze bij Amazon), samen met een boek om over robots te leren(zoals deze bij Amazon).
Bron(nen)